2 finger gripper
RB-Y1에 장착 시, 반복 작업에서도 정밀성과 일관성을 유지할 수 있습니다. 조립, 패킹, 핸들링 등 다양한 자동화 작업에 이상적인 옵션입니다.

RB-Y1은 다양한 적용 환경과 연구 목적에 맞게 유연하게 확장 가능한 모둘형 이동형 양팔로봇 플랫폼입니다. 고객의 요구와 작업 특성에 따라 다양한 옵션을 선택하여 기능을 강화할 수 있습니다.
레인보우로보틱스는 이동성, 센서 구성, 조작 인터페이스 등 RB-Y1의 성능을 극대화할 수 있는 다양한 부가 장비들을 손쉽게 적용 가능하도록 자체개발한 SDK를 제공하고 있습니다. 레인보우로보틱스 SDK를 통해 모듈화된 각 옵션들은 손쉽게 장착 및 연동이 가능하며, 사용자가 원하는 특정 작업에 최적의 성능을 발휘할 수 있도록 지원합니다. RB-Y1의 기본 성능을 넘어, 사용자의 애플리케이션 목적에 최적화된 로봇 시스템을 구현하기 위한 확장 옵션들을 적용하기 위해 개발된 레인보우로보틱스 SDK만의 우수한 호환능력을 경험해 보시기 바랍니다.
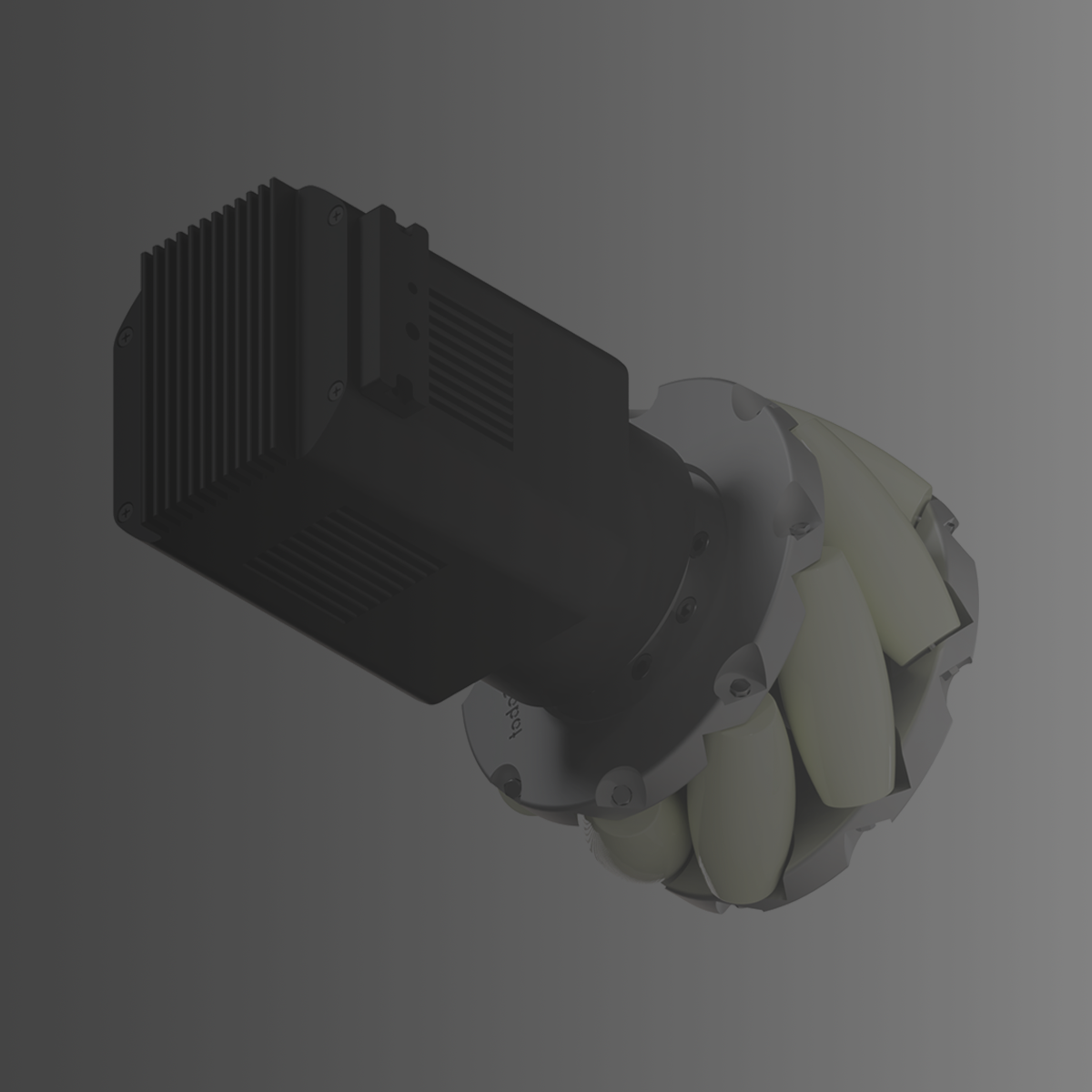
레인보우 로보틱스 자체 기술력으로 개발, 생산하여 제공하는 Mecanum Wheel은 다방향 이동이 가능한 휠 시스템으로, 제한된 공간에서도 자유롭게 움직일 수 있는 기동성을 제공합니다. 기존 바퀴 방식과 달리, 전·후·좌·우 및 대각선 이동까지 구현할 수 있어 협소한 환경에서도 정밀한 위치 제어가 가능합니다. 산업용 현장에서 빠른 이동성과 안정성을 동시에 확보할 수 있어, 물류 자동화 및 실내 작업에 최적화되어 있습니다. RB-Y1과 결합 시, 다양한 작업 조건에 유연하게 대응할 수 있는 플랫폼을 완성합니다. 특히, 고속 주행(1.5 m/s)과 30kg의 페이로드를 지원하여 실용성과 성능을 겸비하였습니다. 또한, Mecanum Wheel Base는 기존 이동형 베이스를 1:1 호환으로 간편하게 교체할 수 있어 설치와 유지보수가 용이합니다. 3D 및 2D LiDAR 센서의 타입과 개수도 맞춤형으로 구성할 수 있어, 자율주행 알고리즘 연구 및 환경 인식 실험에 유연하게 대응합니다.
레인보우로보틱스가 RB-Y1을 위해 개발·제공하는 Master Arm은 다자유도 구조를 갖춘 고정밀 교시 장치로, 사용자가 양팔 로봇의 움직임을 직접 조작하며 다양하고 정교한 작업 모션을 생성할 수 있습니다. 총 14개의 자유도(어깨 3DOF×2, 팔꿈치 1DOF×2, 손목 3DOF×2)를 지원하며, -360°~+360° 회전 범위를 갖춘 각 관절은 부드럽고 정확한 제어를 가능하게 합니다.
Master Arm은 **Imitation Learning(모방 학습)**에 필요한 작업 모션 데이터를 손쉽게 수집할 수 있도록 설계되어, AI 학습용 데이터셋 구축부터 실시간 로봇 제어까지 폭넓게 활용됩니다. RS-485 기반 유선 연결을 통해 안정적인 데이터 전송이 가능하며, 컴팩트한 크기(350× 100×600mm) 와 가벼운 무게(3.86kg)로 설치 공간 제약이 적습니다.
RB-Y1과 결합 시, Whole-Body Motion 기능으로 사람의 직관적인 움직임을 그대로 로봇에 반영할 수 있는 고성능 인터페이스가 완성됩니다. 연구, 시뮬레이션, 원격 제어 등 다양한 환경에서 정밀 제어와 데이터 수집 효율을 동시에 만족시킵니다.
RB-Y1 옵션은 IMU, Gripper, LiDAR 등 다양한 모듈을 포함해, 연구 환경과 개발 요구에 맞춘 맞춤형 휴머노이드 시스템 구축을 가능하게 합니다.
모든 옵션은 RB-Y1 SDK와 완벽히 호환되며, 설치와 유지보수가 간편하도록 설계되었습니다

RB-Y1에 장착 시, 반복 작업에서도 정밀성과 일관성을 유지할 수 있습니다. 조립, 패킹, 핸들링 등 다양한 자동화 작업에 이상적인 옵션입니다.

터치패드와 조이스틱을 이용해 RB-Y1의 상체와 모바일 베이스를 동시에 제어할 수 있는 환경을 제공합니다. 별도의 복잡한 설정 없이 바로 연결하여 직관적인 로봇 운용이 가능합니다.

RB-Y1에 탑재 시, 확장성과 응용 가능성을 획기적으로 넓혀줍니다. 또한, 레인보우로보틱스는 Multi-DOF Finger 연동 예제가 포함된 SDK를 함께 제공하며, 향후 다양한 제조사의 다지관절 핸드와의 호환을 위한 SDK 지원을 지속적으로 확장할 계획입니다.

VR 기반 원격 제어로, Dex Hand와 결합 시 양손의 몰입형 제어가 가능합니다. 실시간 반응성과 직관적인 인터페이스를 통해 복잡한 작업을 원격에서도 정밀하게 수행할 수 있습니다.