완전한 이동형 양팔로봇 플랫폼
- 한 팔당 7축, 총 24자유도 구조로 사람처럼 유연한 움직임
- 바퀴형 고속 자율주행 플랫폼 탑재 (최대 1.5m/s)
- 산업용 로봇과 달리 전신 모션(Whole-Body Motion) 제어 지원으로 균형 잡힌 작업 수행

RB-Y1은 전 세계 3,000대 이상 판매된 협동로봇에서 이미 검증된 내구성과 정밀 제어 기술을 그대로 적용했습니다. 핵심 구동부에는 하모닉 드라이브 기반의 고정밀 모션 시스템을 사용해, 미세한 위치 제어가 필요한 작업에서도 안정적인 성능을 발휘합니다. 또한, 모듈형 구조로 설계되어 유지보수와 부품 교체가 용이하며, 향후 기능 확장에도 유연하게 대응할 수 있습니다. 하부에는 고속이면서도 안정적인 주행이 가능한 바퀴형 모바일 플랫폼을 탑재하여, 다양한 환경에서 민첩하고 효율적인 이동이 가능합니다.
RB-Y1은 한 팔당 7자유도의 양팔, 6자유도의 다리, 모바일 주행 플랫폼을 결합한 이동형 양팔로봇으로, 복잡한 산업 공정, AI 연구, 양팔 협업 작업까지 수행할 수 있도록 설계된 범용 휴머노이드 로봇 플랫폼입니다.



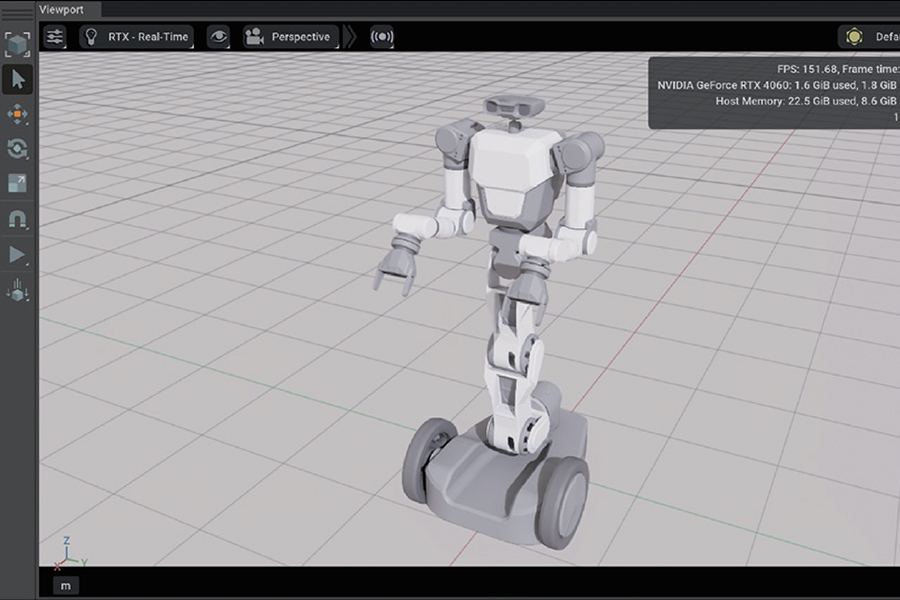
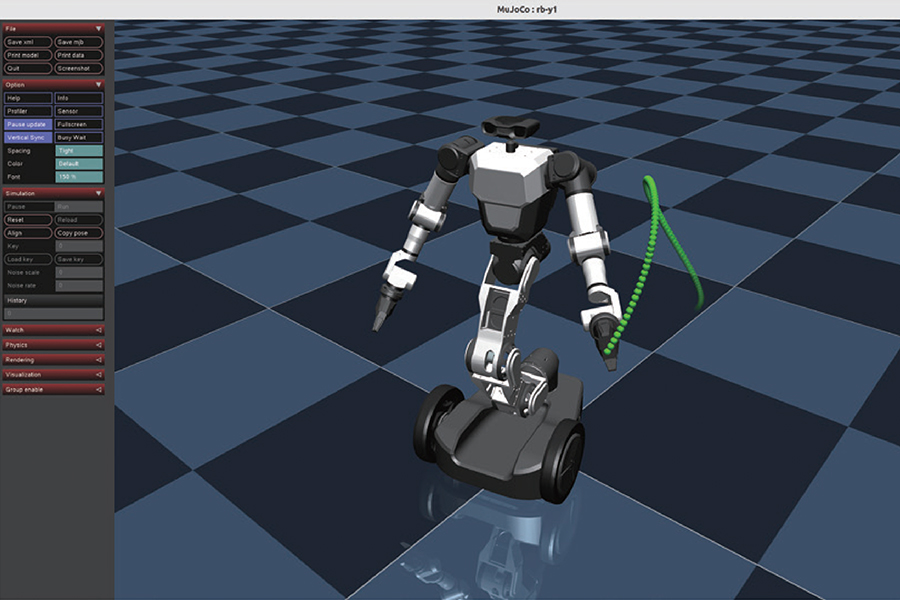
NVIDIA의 Isaac Sim은 고성능 그래픽 기반의 물리 시뮬레이션을 통해 복잡한 작업 시나리오와 AI 학습 환경을 사실적으로 재현할 수 있습니다. MuJoCo Simulator는 정밀한 동역학 계산과 빠른 피드백 속도로 로봇 제어 알고리즘과 균형 유지 연구에 최적화된 플랫폼입니다. 두 환경 모두 URDF와 MJCF 모델을 지원하여 개발자는 손쉽게 로봇 모델을 불러와 실험할 수 있고, 실제 하드웨어를 사용하지 않고도 안정적인 가상 테스트와 다양한 시뮬레이션을 수행할 수 있습니다. 이를 통해 연구자와 개발자는 보다 효율적으로 로봇의 성능을 검증하고, AI 기반 응용을 빠르게 개발할 수 있습니다.
| 항목 | 내용 |
|---|---|
| 크기 | 600 × 690 × 1,400 mm (W × D × H) |
| 자유도 |
|
| 팔 가반하중 | 3 kg (한팔 당) |
| 관절 구동 범위 |
|
| 항목 | 내용 |
|---|---|
| 전원 사양 | 48 VDC |
| 외관 재질 | 알루미늄 |
| 배터리 용량 | 50 V, 25 Ah (1,270 Wh) |
| 중량 |
|
| 팔 도달 범위 | 600 (to wrist) + hand [mm] |
| 안전 기능 | Low Level Controller (Motor Controller)
High Level Controller
|
| 팔 반복 정밀도 | < ±0.05 mm |
| 작동 온도 | 40°C |
| 주행 운용 속도 | 1.5 m/s |